Exercise: Automatic Control Systems
Questions for: Automatic Control Systems
In the given figure the input is x(t) = A sin ωt. The steady state output y(t) =
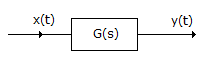
Answer: B
The magnitudes A and G(jω) are multiplied and phase angles are added.
In Bode diagram (log magnitude plot) the factor  in the transfer function gives a line having slope
in the transfer function gives a line having slope
in the transfer function gives a line having slope
Answer: C
For  term the slope is -20 dB/decade or -6 dB/octave because - 20 log 2 = -6 dB.
term the slope is -20 dB/decade or -6 dB/octave because - 20 log 2 = -6 dB.
For type 2 system, the magnitude and phase angle of the term (jω)2 in the denominator, at ω = 0, are respectively
Answer: C
If ω = 0,  has a magnitude of infinity and phase angle -180°.
has a magnitude of infinity and phase angle -180°.
A lag compensator is essentially a
Answer: A
See transfer function in the equation  , β > 1
, β > 1
where t1 = R1C1, t2 = R2C2 and t > 1.
Ad Slot (Above Pagination)
Discuss About this Question.